现今科技界,元宇宙一词广为流传,同时也带有不少神秘和未解之谜。镜·元宇宙特别关注对现实世界的三维复制以及虚拟环境的融合,三维数据的储存技术在其中扮演了关键角色。这背后究竟蕴藏着怎样的令人激动的科技秘密?
镜·元宇宙初印象
镜·元宇宙融合了现实与虚拟,开创了一条新颖的发展途径。这一创新理念在全球各地科技研发机构中引起了广泛关注。众多科技工作者纷纷加入这一领域。它不仅是一个技术概念,更是可能颠覆我们生活方式的关键因素,比如在虚拟旅游或虚拟办公等领域可能引发的变革。其中所涉及的三维数据存储,是众多功能实现的基石。
技术专栏的介绍,激发了众多科技迷的研究兴趣,他们纷纷渴望了解,这项技术在现实世界三维建模与虚拟环境结合方面,究竟能达到何种高度。
三维数据存储方式概述
三维数据在镜·元宇宙中扮演着极为关键的角色。这类数据,不包括色彩信息,主要通过深度图和点云两种形式进行存储。这些方式在不同科技应用中展现出各自的优势。而不同的企业及科研团队,对这两种存储手段的选择偏好也各有千秋。
这两种存储技术的演进同样走过了一段历程。起初,它们的研究较为单一。而现在,它们正逐步建立起完善的体系。各地的研究成果对这两种存储方式的发展起到了推动作用。比如,一些发达地区的数据处理能力较强,这加速了三维数据存储技术的研究步伐。
点云(XYZ)解析
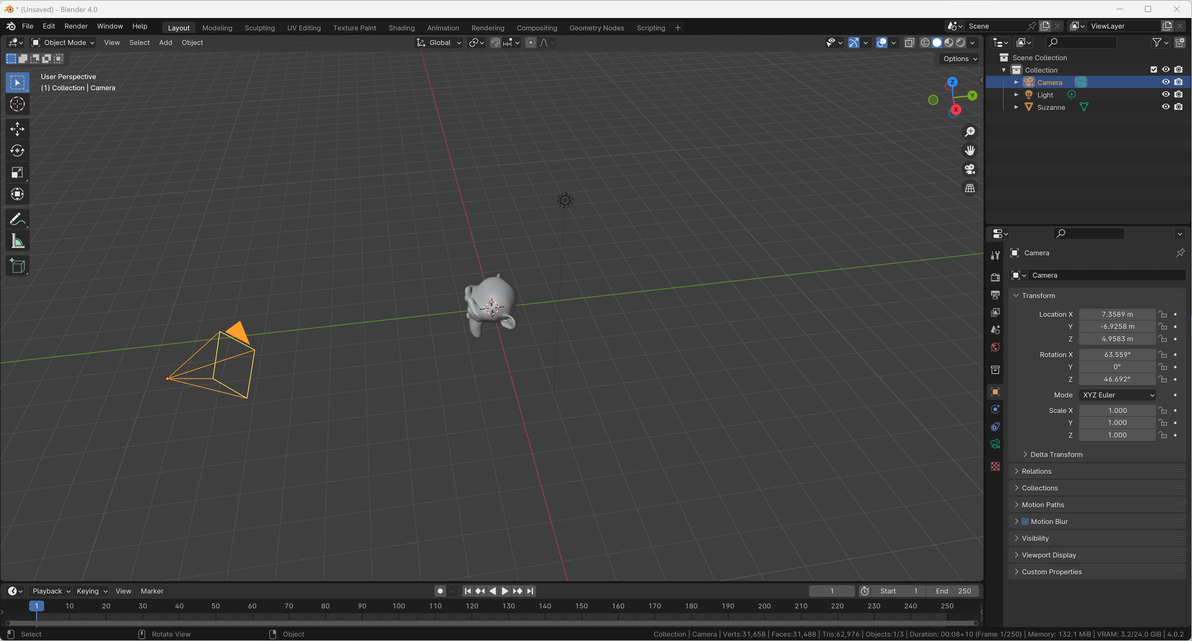
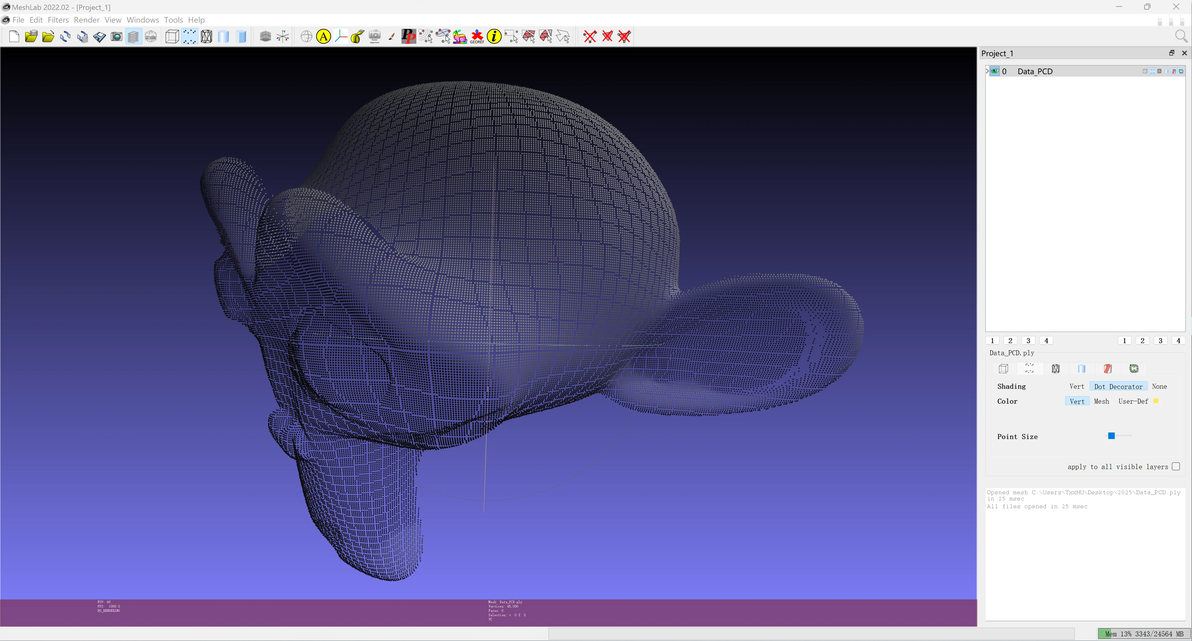
点云(XYZ)是常用于存储点云数据的方法。众多文件格式,例如PLY文件,充分展示了这种存储形式。比如我们之前看到的导出立方体,其中清晰标注了8个点。这些点的坐标都配有清晰的XYZ数值。
这种数据格式在众多实际应用中均有明显应用。以建模为例,若需塑造特定立体形态,采用点云(XYZ)存储方式便能准确标注各点坐标。而在建筑设计公司,设计师们常用此格式来精确标注建筑模型中的点位,已成为一种普遍做法。
深度图是什么
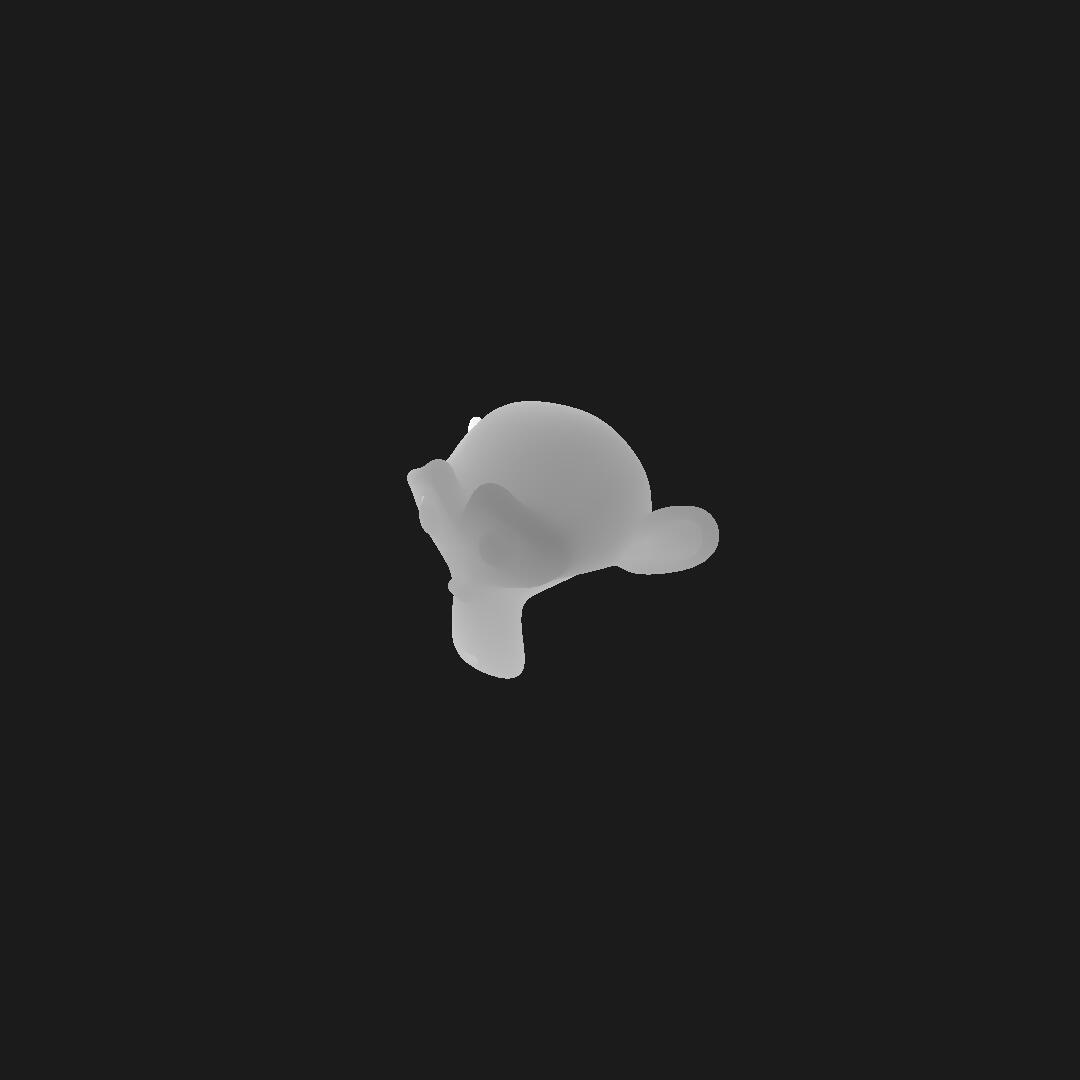
深度图是一种独特的数据存储形式。它通过图像来保存深度信息,实际上主要记录的是Z轴的数据。比如,我们之前讨论过的那个1080像素乘以1080像素的深度图就是一个典型例子。通过观察图中的灰度值,我们可以了解每个点到相机的具体距离。
而且深度图具有显著的双向功能。通过深度图和相机内参的逆向解码,可以生成点云。在研发相机拍摄设备时,这一特性尤为受到重视。尽管不同类型的相机生成的深度图数据存在差异,但其基本原理却是一致的。
深度图和点云的应用场景
多数RGBD相机在输出数据时提供了多样的选项。不过,在具体操作中,深度图(Depth)的使用更为便捷。以Intel的D455为例,若追求数据的稳定性,848*480的深度数据便易于掌控。
点云数据(XYZ)存在一定的不确定性。在利用SDK获取此类数据时,其数据量并不固定。因此,对于那些对数据处理有严格要求的场合,特别是对输入输出数据精度要求较高的场景,点云数据可能并不适合。不同的科技应用场景会根据自身的特性来决定是采用深度图还是点云数据。
未来展望
镜·元宇宙的进步空间广阔。技术不断进步,三维数据的保存领域前景无量。不论是点云还是深度图,都将应用于更多场景。然而,在这一进程中,我们也遇到了难题,比如数据的安全与精确性问题。
亲爱的读者们,大家觉得“镜·元宇宙”最早可能在哪一行业广泛运用?期待大家积极参与讨论,点个赞,把这篇文章转发出去。






暂无评论
发表评论